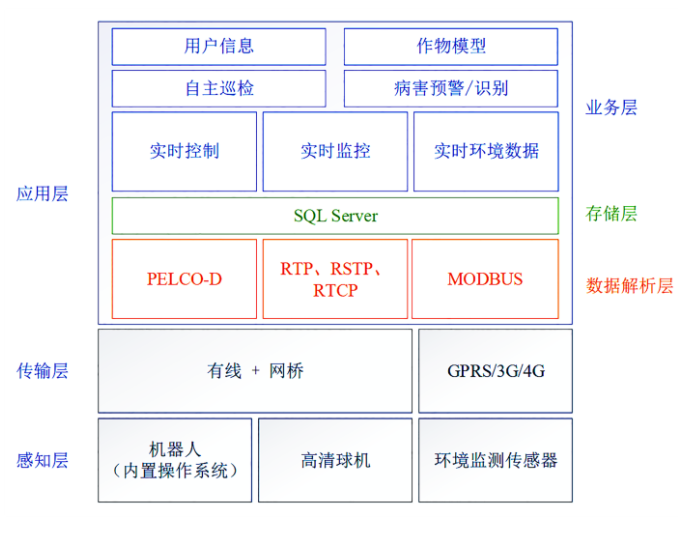
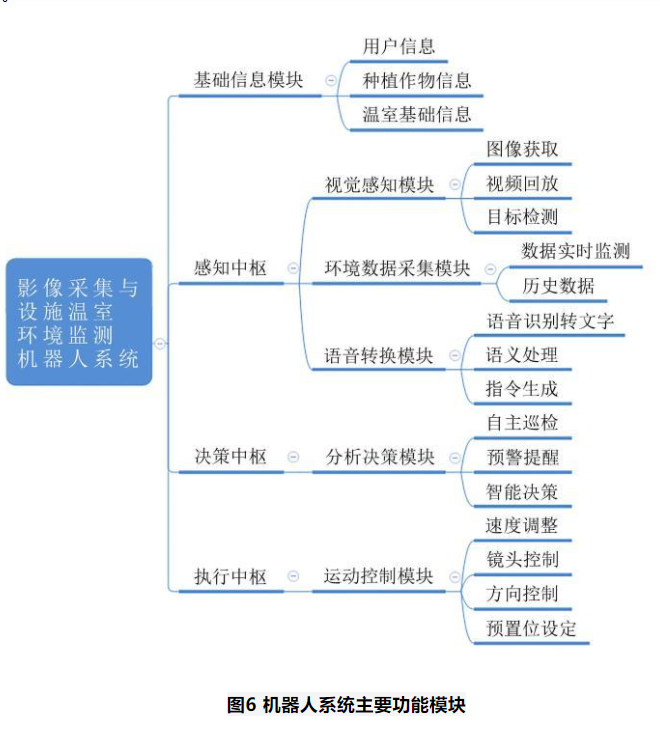
近30年的中国设施农业快速发展,外出务工,留在家里种田的人数呈下降趋势,如何用“机器代替人力”成为最新热点。为了实现温室生产数据感知环节中作物图像和环境监测数据的精确采集,郭伟、吴华瑞、朱华吉研究设计了多自由度温室图像采集和环境监测机器人系统。它由机器人感知中心、决策中心和执行中心三部分组成,分别用于从机器人的角度感知环境、分析数据、生成决策指令和执行动作。实现传感层多角度图像、实时视频和监测数据的精确网格化采集,为农作物多源异构数据的精细融合奠定基础;监控数据和控制指令通过传输层的无线网桥汇聚到本地数据中心;数据处理层通过作物基本模型分析进行控制指令反馈信息,同时对上传的图像进行预处理;最后,在应用层提供web和手机上的智能服务。

郭伟、吴华瑞、朱华吉研究设计了一种多自由度温室图像采集与环境监测机器人系统。它由机器人感知中心、决策中心和执行中心三部分组成,分别用于从机器人的角度感知环境、分析数据、生成决策指令和执行动作。实现传感层多角度图像、实时视频和监测数据的精确网格化采集,为农作物多源异构数据的精细融合奠定基础;监控数据和控制指令通过传输层的无线网桥汇聚到本地数据中心;数据处理层通过作物基本模型分析进行控制指令反馈信息,同时对上传的图像进行预处理;最后,在应用层提供web和手机上的智能服务。
机器人系统具有以下特点。
(1)多源数据精准获取,通过四自由度动态监测,运动误差低于2.2 cm。实现监测半径80%的覆盖率,为生产和科研人员农业大数据分析提供更加精细地数据采集方式;环境数据实现网格化采集,精确度达到温室内每个试验区。
(2)实现多类终端远程全天候实时管控,生产农户和科研专家可以随时随地观察种植现场情况。
(3)操作简洁实用,输入语音实现自动指令自动发送,解决部分农户操作不便的问题。
(4)自动提取现场病害图片,通过系统标准化预处理,结合后台深度学习算法实现对番茄百分病的识别。
(5)实现无人巡检,机器人根据预先设定的观测区域实现周期性移动监测。一方面减少园区人力成本投入,另一方面实现夜间巡检,保证了温室现场安全。
本研究在多自由度监测基础上,通过后端平台数据赋能,完成简单的定点观测、自动巡检和预警任务,但在现场智能服务方面,还有很大的扩展空间,后续将在以下三个方面进行优化。
(1)在机器视觉目标检测方面,通过实时对接农业大数据中心,搭载作物病害识别算法[31-33],实现对病斑的实时识别,将通过业务服务器分析识别结果,向用户反馈病害信息、防治方法、推荐药物乃至购买链接。
(2)在用户使用过程中,记录操作指令与设备三维坐标,操作数据信息和运动过程,归纳不同类型用户使用习惯,形成历史数据集,结合温室尺寸、种植作物类型、种植方案,并基于习惯进行巡检方案自更新,实现温室作物种植全生命周期精准观测。
(3)作为智控的一个重要结构单元,与温室内各类电气设备、传感器、控制终端、传输节点以及各类机器人共同形成人工智能管控体系,根据作物生长环境需求进行智能作业。
 官方微信
官方微信